Situatie
Conectare receptoare de tip PPM / RC
Acest articol va face referire la conectarea unui receptor de telecomanda de tip PPM la placa Pixhawk.
La aceasta placa se pot conecta si receptoarele PWM(single-wire-per-channel) dar numai cu ajutorul unui PPM encoder.
Modalitatea de conectare este explicitata in imaginea de mai jos:

Dupa conectare se va efectua obigatoriu calibrarea,
Operatiunea de calbrare va fi explicitata intr-un articol viitor.
Solutie
Conectare GPS la autopilot Pixhawk
Pentru a putea avea functia de zbor autonom va trebui sa conectam la modulul autopilot modul 3DR UBlox GPS + Compass Module .
Acest modul permite obtinera cu o frecventa de 1s a coordonatelor GPS cu o precizie de pana la 1m.
Acest lucru este necesar pentru a permite multicopterului sa isi pastreze pozitia fixa chiar si in conditii de vant pana la 30 km/h.
O alta facilitatea posibila cu acest modul este zborul planificat, lucru care permite executarea autonoma de misiuni de zbor.
Conecarea acestui dispozitiv se face pe portul GPS al placii Pixhawk si este explicitat in imaginea urmatoare:
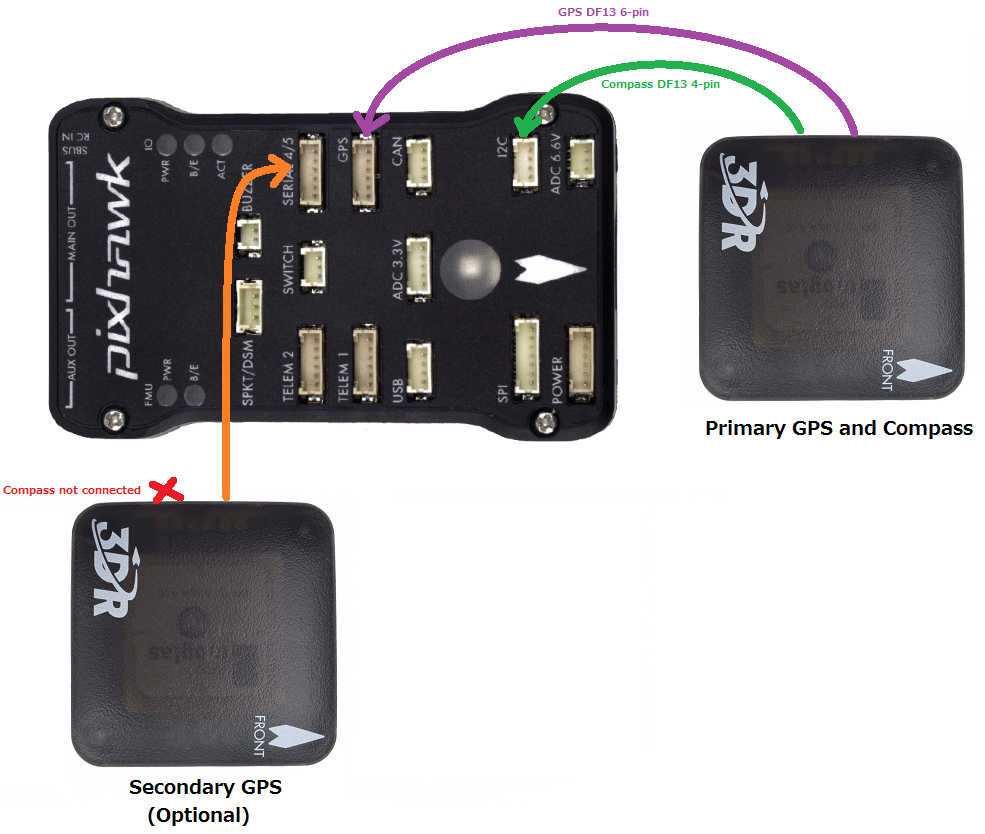
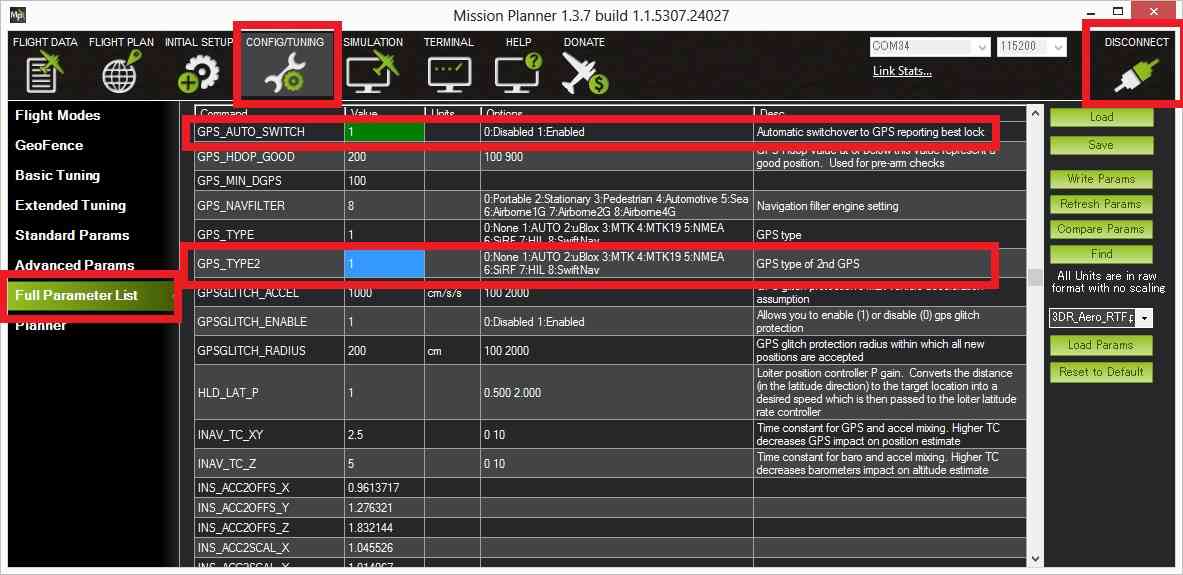
Dupa cum vedeti se poate conecta un al doilea GPS pentru obtinerea unei redundante mai mari si evitarea situatiei in care receptorul GPS se defecteaza si este imposibila continuarea misiunii planificate. In acest caz in aplicatia manager se vor insera urmatorii parametri:
- GPS_AUTO_SWITCH = 1
- GPS_TYPE2 = 1
Acest lucru va permite alegerea de catre placa a receptorului care are cea mai buna receptie( cei mai mi=ulti sateiti fixati).
Acest lucru este posibil din aplicatia de management
Leave A Comment?